


无图NOA是当前理想汽车最领先的量产智能驾驶能力,尤其针对复杂的城市路况体验明显提升。AD Max车型底层架构与AD Pro不同,它基于激光雷达与视觉前融合的占用网络,并且针对通用障碍物的感知和规划能力显著增强。
针对复杂城市环境的驾驶辅助功能,对芯片的计算能力和传感器硬件提出了更高的要求。只有配备了双Orin-X芯片的AD Max系统支持城市NOA功能;当前AD Pro车型仅具备高速NOA能力,暂不支持城市NOA。
4.有图和无图怎么界定,对体验的差别/提升是什么?
“无图”和“有图”的区别关键在于是否利用先验信息来辅助车辆进行导航和决策制定。无图NOA不依赖高精地图等先验信息,拓宽了使用范围,让无图NOA在各类环境中都能展现出色的适应性和可靠性,而且在整体性能上实现了显著提升。
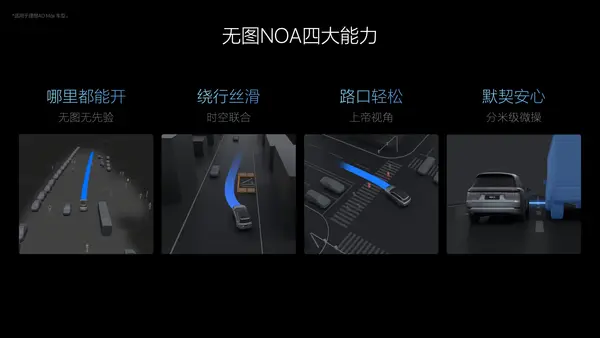
无图NOA拥有以下四个明显优势:哪里都能开、绕行丝滑、路口轻松、默契安心。
· 哪里都能开,无图无先验:不依赖高精地图、轻图等“先验信息”,不用“开城”、不限城市、乡镇,只要车端能发起导航的地方,就能开启NOA。
· 丝滑绕行,时空联合:持续预测自车与他车行驶轨迹,具备时空联合规划能力,车辆横纵向控制同步规划,遇到占道的车辆、行人、骑行人、异形障碍物等,都能像老司机一样选择最优路线果断绕行。
· 路口轻松,上帝视角:BEV视觉模型融合导航匹配算法,充分融合车道结构和导航特征,为车辆打开上帝视角。复杂路口选路更准,轻松通过,更少接管,更高效率。
· 默契安心,分米级微操:视觉与激光雷达前融合的占用网络,更早识别路沿、安全岛等不规则通用障碍物。遇见路权博弈的交通参与者更早预警、加减速时机更得当。
5.无图NOA需要注意哪些事项?
智能驾驶正处在发展期,产品体验也带来巨大提升,但是在某些复杂的交通状况下,它和人类老司机还有一些差距。面对一些复杂场景,提醒大家这些情况下车辆有可能表现不符合预期,务必要保持注意力并及时接管。