



最初,特斯拉在研发自动驾驶技术时,马斯克与部分工程师产生了争执——是否一定要通过雷达实现车辆的Autopilot自动辅助驾驶功能?
传统车企通常选择的路线,通常是使用雷达与摄像头相结合,让感知更精准。工程师在工作中发现,在摄像头的基础上添加雷达等额外的传感器,反而会影响最后的分析速率和结果,冗长的程序代码也会让行车系统表现得不够“聪明”。
“如果雷达与摄像头分析的信息相互矛盾,智能驾驶系统反而会难以抉择。不如只选其一,做到极致。”马斯克坚持摆脱惯性思维,从第一性原理出发,认为车辆自动驾驶系统完全可以模仿“人眼”,通过摄像头感知识别分析视觉数据。
“雷达不是实现自动驾驶的最佳选择,道路是为神经网络和眼睛设计的。”在马斯克看来,如果人可以依赖双眼识别交通情况,实现安全驾驶,那么车也可以做到。

最初,马斯克在雷达问题上保持开放的态度。但到了2021年年初,芯片短缺等原因导致整个行业的雷达供应开始出现问题。在经过几次会议讨论后,最终马斯克拍板决定:“从今往后去除雷达,这根‘拐棍’太糟糕了,我没开玩笑。显然,开车只用摄像头的效果很好。”
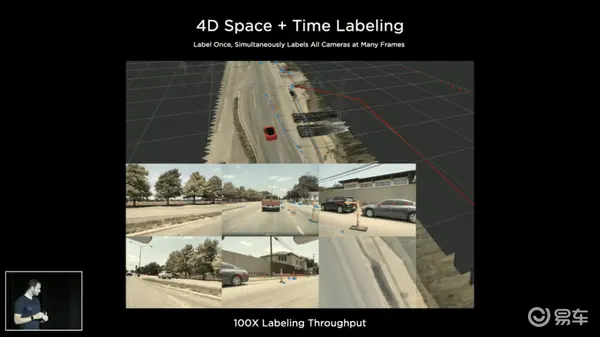
纯视觉方案的关键在于,系统需要具备极快的识别速度,能够精确地识别并感知实际道路情况,然后通过“深思熟虑”,做出准确的决策。为此,特斯拉将更多资源和精力投入到自主研发芯片,以解决算力方面的问题,并且创建了Dojo超级计算机,用于数字神经网络的深度学习,从而真正实现车辆的完全自动驾驶。
特斯拉基于纯视觉方案的自动驾驶技术发展至今,越来越多的车友亲身体验后纷纷感叹“真香”。