


此外,通过前面提到的BEV感知技术,云朵将具备实时场景重建、道路拓扑结构重建等功能,这使得车辆在无需高精地图模块的情况下,也能够通过视觉影像感知与实时导航系统实现局部的“在线高精地图”,并在智能行车辅助、高速智能领航辅助的过程中,提供包括其它车辆、道路障碍物等元素模拟显示,进一步提升驾驶人在智能辅助过程中的实时路况掌握,让行车更为稳定安全。

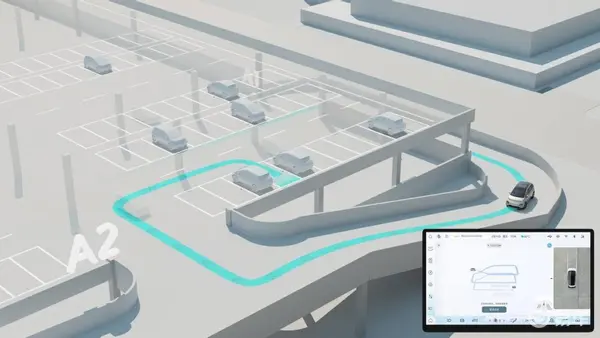
落在实际场景当中,通过这种强双目、强感知、高算法技术路线,云朵现在不光能在一些纵向、垂直、斜向,甚至是不规则车位中完成自动泊车,甚至能够通过路线记忆的方式,实现跨楼层的记忆泊车,而且我们甚至不需要进入停车场再去启动,其在入场前就能启动,最长1km的路线记忆就算是中途遇到障碍物也能有效避让,泊车过程中不要驾驶人做额外操作。
同时,云朵的智驾功能在城市与高速路段都有不同的应用方式,在城市里面对早晚上下班高峰,那些停停走走地反复操作会让人很容易感觉到疲劳或是厌烦。而这时候,云朵能通过智能行车辅助实现自动跟车启停,就算是在等待红绿灯时,它也能快速响应反馈,面对那些不讲道理的加塞,车辆也会提前判断识别并进行平缓的减速。另外,说到这减速,若是遇到一些意外状况的发生,像是有车辆侧翻、大车掉落货物,或是车道上出现不规则的施工围栏等等,这套系统也都能进行智能识别并完成避障操作,智驾过程中的安全性也大大增强了。值得一提的是,全国记忆领航功能也将会在年底内开启,单程最大距离100km,可最多记忆10条路线。